The Three Sirens
unsupervised selflearning robotic rock band



The newly created bandmembers were Peisinoe (single string bass) and Thelxiepeia (roto drum).
The Three Sirens premierd with a 3 day performance during "Mediale", Hamburg 1993.
The bass robot system operates in a similar fashion as the slide guitarnsystem. Only simpler because the bass has only one string.
The drum robot however only follows pre programmed patterns at system heartbeat. At an early development stage it became aparent that my neural network design can not control temporal patterns as it would be required for playing the drums.
I then added a voice to the lineup. ASCIIlizer, a set of neural networks, similar to those used by guitar and bass, that controls a bank of sampled phonems. The phonem were edited from recordings of my voice. Through endless hours of training the networks learned to control playback of these vocal fragments in volume, pitch and speed.
More rhythmic devices were added to the band. LynxArm for example is a small robot arm carrying a camera and bashing it rhythmicly into a block of wood. Camera images were used in a live video mix and the block carried a contact microphone.
Later I also added: kick drum, tomtom, hi hat, cymbal and shaker to the percussion section.
On several occasions I gave control over a standard synthesizer to Kohonen Networks. Thereby creating some more virtual band members to jam along.
The Three Sirens are not conventional musical instruments and they are not puppets but autonomous, self learning robot musicians. They are not influenced by human knowledge but explore their acoustic world and search for structure and corelation. Artificial neural networks control every aspect of the robot's activities and they only know what they hear. This means that the authorship for their music does not belong to any living being (no predefined material or musical knowledge is available to the system), all musical material is generated by self organizing learning processes in an improvising manner.

| -^- |
Aglaopheme, the guitar player
Six solenoids are used to either dampen and release or to pluck the strings.
A short piece of cable tie serves as a very durable plectrum that is moved across the strings by a linear motor to pick selected strings. The entire plectrum-drive assembly can be pulled away from the strings by a solenoid to allow the plectrum to drive to the desired strings without hitting any others.
A dc motor drives a sledge up and down the guitar neck. This sledge carries the slide and a small solenoid that pushes the slide against the strings if necessary. The sledge also carries a small video camera.
Two more video cameras are attached to the machine. One is located at the lower end of the guitar neck. The other one is mounted on top of a leg-solenoid.
Two big solenoids serve as legs to the robot. They can push up the entire framework in two different directions and thereby make the robot rock. This rocking motion also moves the whaa-whaa pedal up and down.


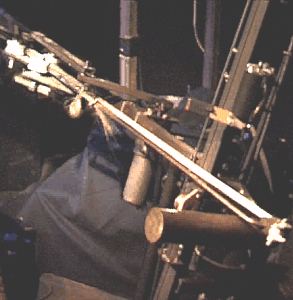
The other Members of the Band
In order to vary the pitch, the robot uses one strong solenoid to adjust the tension of the string. The machine has two mechanisms to cause vibration of the string: a motorized bow and a slapping device.
Aciilyzer, the voice of The Three Sirens is still somewhat bodyless. Again, there is a neural network that takes audio spectrum data as sensorial input and that is in control of an sound generating device. But in case of this band-member the visual appearance of the machine is very boring.
Thelxiepeia, the drum was build around an existing rototom, a drum that was fashionable in the seventies. On this drum the player could change the pitch during playing by turning it. I motorised the rotational activity and added a mechanic drumstick.
LynxArm is a small five axis robot arm kit that I bought during a robotic exhibition in Vienna. After assembling the kit I changed one mechanic function and attached a small camera to what originally was the gripper. I also attached some sound pickups to the framework. The robot now knows two modes of operation. It either follows directly the spectrum analysis of the guitar sounds or knocks the camera against a small wooden board at system update tempo divided by four.
